![]()
![]()
はじめまして!大阪大学基礎工学研究科 原田研究室の中津留健人です.
ホームページに来ていただき,ありがとうございます.
ここでは,自身のプロフィールや研究内容などについて紹介しています.
氏名
中津留健人
所属
大阪大学基礎工学研究科 原田研究室
生年月日
1998年6月25日
高校
兵庫県立小野高等学校
趣味
旅行



接触状態の遷移を考慮した大型物体のマニピュレーション計画
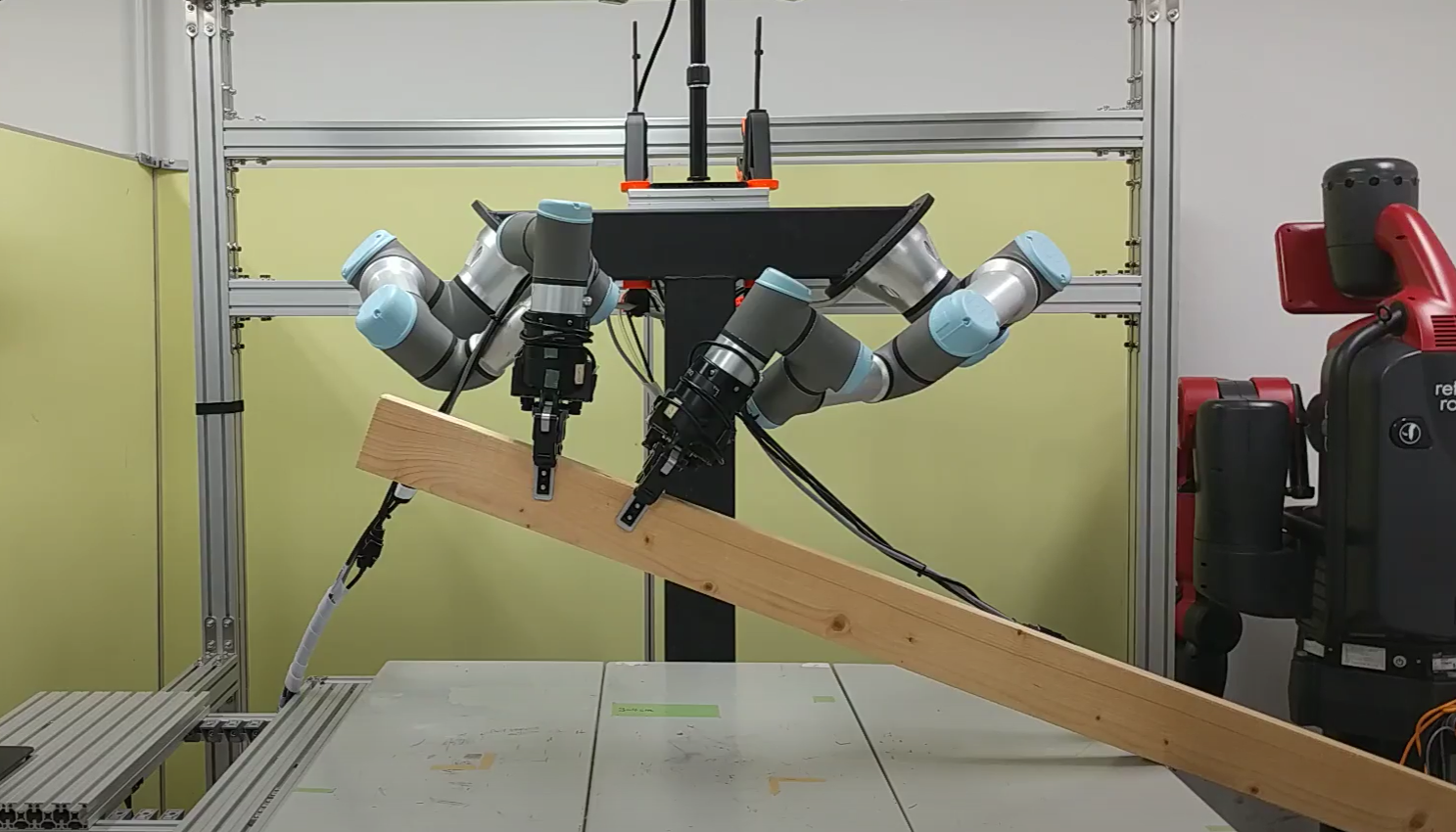
近年,作業現場での人手不足が深刻化しており,ロボットによる自動化や省人化が求められている.作業現場でロボットが担う作業としては物体を把持し,所定の位置まで移動させるピックアンドプレースが挙げられる.しかし, ロボットが扱うことができる荷重には限界があり,持ち上げることが出来ない大型物体の操作は困難である.そこで本研究では, 大型物体を操作するために物体を環境と接触させたまま移動させる手法を提案する.大型物体が移動可能な経路を作成するために,物体と環境との間に発生する接触の状態を要素としたグラフネットワークを探索する.本手法の有用性を示すために,大型物体を作業台に引き上げる動作と作業台の上で方向転換する動作を対象とした実機実験を行った.実験結果から,ロボットに大きな負荷がかかる状態を避けて経路計画を行うことが可能であることが分かった.
環境との接触を利用した大型重量物のモバイルマニピュレーション計画と最適化
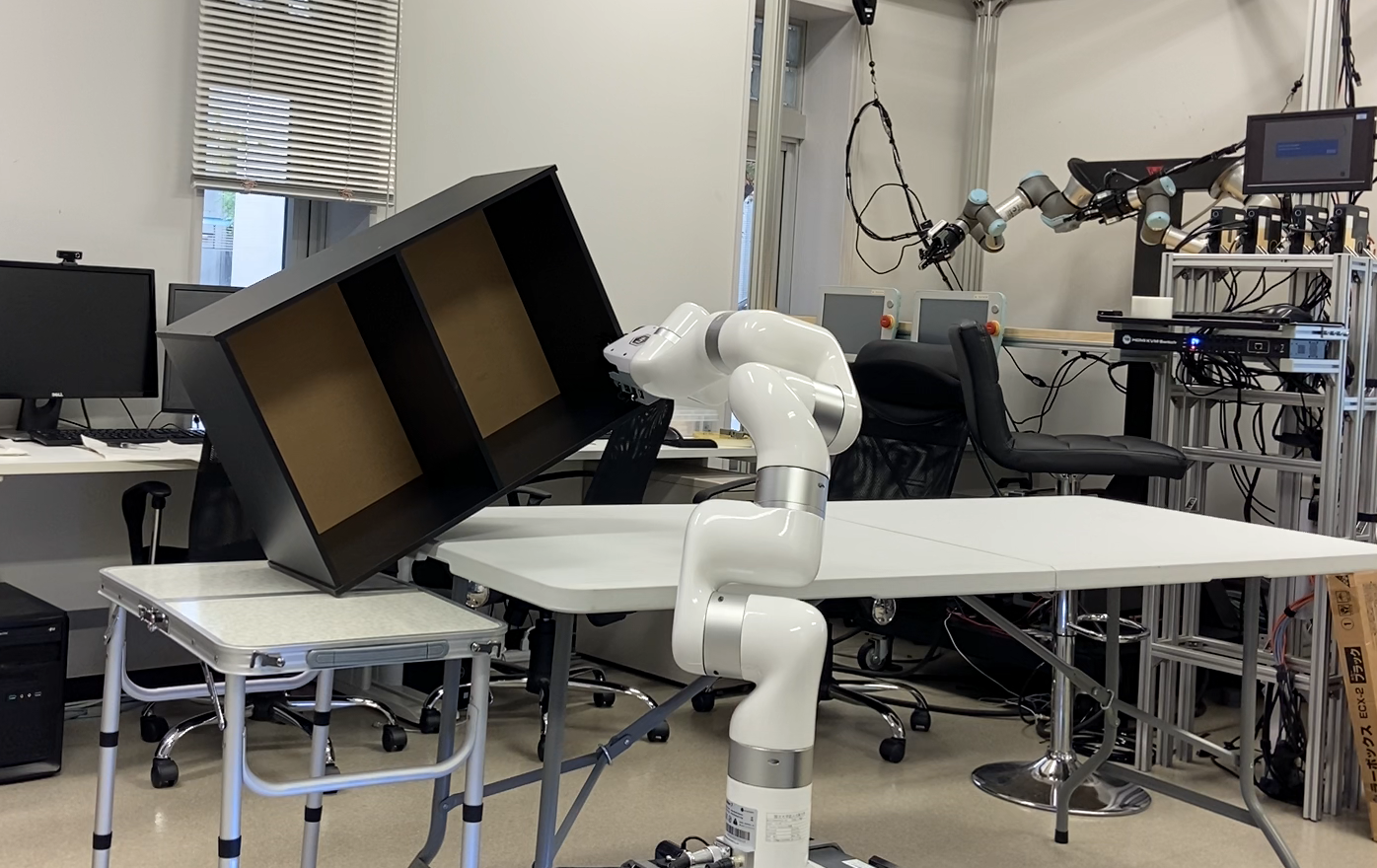
協働ロボットが苦手とする作業の一つに,大きくて重量のある物体を扱う作業が挙げられる.一般に,ロボットが扱うことができる荷重には限界があり,可搬重量を超えるような重量物を持ち上げて移動させることはできない.また,可搬重量以内であってもロボットの姿勢によっては,関節に過負荷が加わり,ロボットが停止する可能性がある.そこで本研究では,環境との接触を利用して,可搬重量以上の大型重量物を操作する手法を提案する.手法の流れとしては,まず,環境を利用した操作物体の軌道計画を行い,次に,それに基づくモバイルマニピュレータの動作の最適化を行う.物体の軌道計画の際に,本手法では,マトリョーシカ接触モデルを提案する.マトリョーシカ接触モデルは,物体輪郭を一定の割合で拡大・縮小した2つの幾何学的モデルを用いることで物体と環境との衝突検知を容易にする手法である.この接触モデルを利用して動作計画を行うことで,従来手法では複雑なプログラムが必要であった物体間の接触の問題を容易に解決することができる.また,生成した物体の軌道計画に基づくロボットの軌道を,ロボットに過負荷が加わらないような姿勢に最適化を行うことで,大型重量物の負荷に耐えうるようなロボットの軌道を生成する.
〒560-8531
大阪府豊中市待兼山町1-3 基礎工学研究科F棟531-33号室 原田研究室